Roboter
Die Robotersysteme der Bestrahlungseinheit CyberKnife sowie der Patientenliege Auto-Couch werden gemeinsam durch eine komplexe Software koordiniert. Auf diese Weise können Patientenposition und Bestrahlungseinheit optimal in Einklang gebracht werden - der Roboter passt sich quasi dem Patienten an.
Das Herzstück des CyberKnife-Systems bildet dabei ein sechs-achsiger Roboter, auf welchem ein sogenannter kompakter Linearbeschleuniger (LINAC) montiert ist. Dieser Roboter ermöglicht es, den Behandlungsstrahl flexibel und präzise zugleich zu steuern und in nahezu jede zu bestrahlende Körperregion zu lenken.

Auto-Couch
Auf der Behandlungsliege wird der Patient zu Behandlungsbeginn automatisch in die exakte Position gefahren.

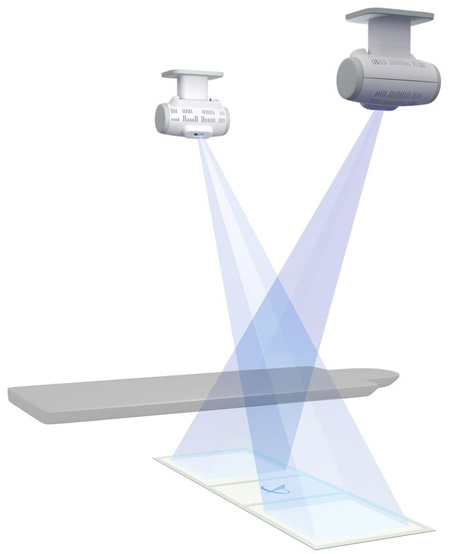
Bildortungssystem
Das zur exakten Strahlenabgabe ebenfalls notwendige Bildortungssystem besteht aus zwei Röntgenröhren an der Decke sowie zwei im Boden eingelassenen Bilddetektoren.
Die mit Hilfe dieses Systems generierten Positionsröntgenaufnahmen werden mit den zuvor im Planungs-CT errechneten Positionsbildern (DRRs) abgeglichen. So lassen sich leicht eventuelle Abweichungen der tatsächlichen von der geplanten Tumorposition errechnen und durch das CyberKnife sowie die "Auto"-Couch automatisch ausgleichen.
Das Zusammenspiel der Komponenten des CyberKnife-Systems mit der Bildortung und automatischen Auswertung sowie Korrektur garantiert dabei, dass alle abgegebenen Strahlen mit höchster Präzision in das definierte Zielgewebe gelenkt werden.